申请号:CN202311732118.9
申请日期:2023.12.16
失效日期:2043.12.16
申请人:东北石油大学
价格:面议
立即购买
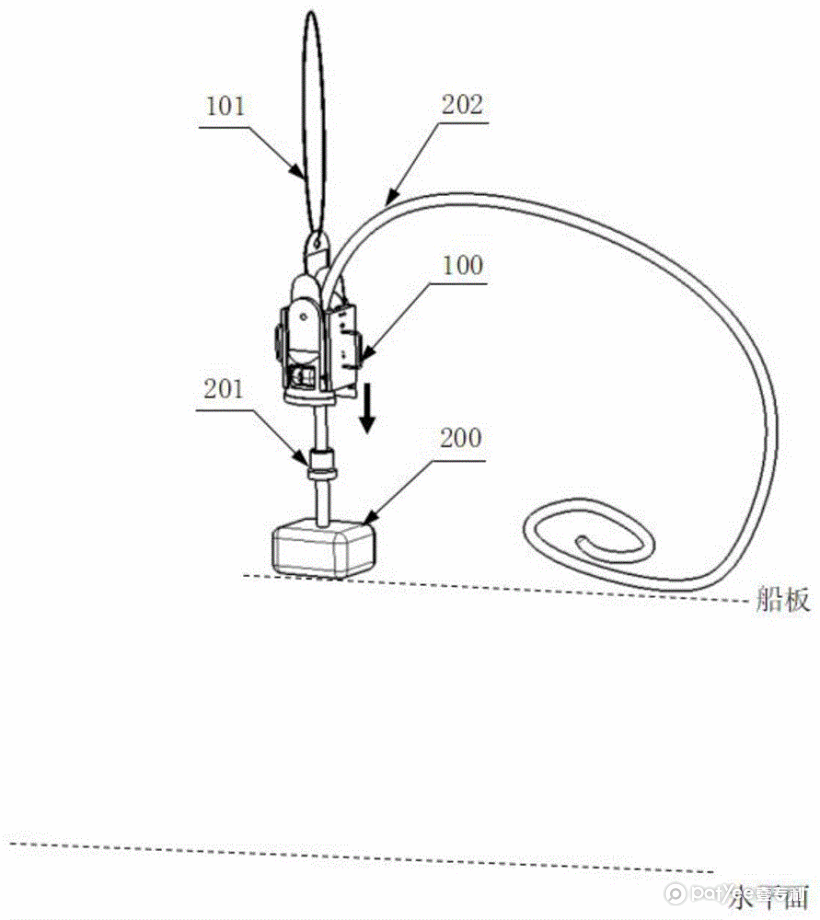
本发明涉及脱钩器组件以及应用其的有缆水下机器人自动脱钩器,所述自动脱钩器包括固定机构和运动机构;固定机构用于承载和安装运动机构,运动机构包括由止动、推杆和吊钩三套组件,通过在船板上或岸上调整自动脱钩器内拉伸弹簧的位置,改变运动机构的配合状态,进一步来控制自重吊钩的张开和闭合;当进行ROV下水放置作业时,ROV着水漂浮后,脱钩器中的自重吊钩可实现自动张开,与ROV吊钩脱离卡合;当进行ROV回收打捞作业时,脱钩器中的自重吊钩与ROV吊钩接触后可实现自动闭合而卡合。应用所述自动脱钩器后,再无需潜水员下水配合吊装装置进行ROV取钩和上钩工作,全面解决了设备入海下放、回收时无法实现自动脱钩和上钩的问题。