申请号:CN201710022755.5
申请日期:2017.01.09
失效日期:2037.01.08
申请人:东北石油大学
价格:面议
立即购买
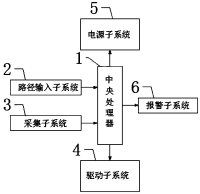
本发明公开了机器人技术领域的一种机器人的路径控制方法及系统,包括中央处理器,所述中央处理器分别电性输入连接路径输入子系统和采集子系统,所述中央处理器分别电性输出连接驱动子系统、电源子系统和报警子系统,本发明通过路径输入子系统对路径进行下载,转换成机器人可识别的路径数据,通过采集子系统对机器人的行驶姿态、速度、距离、前方有无障碍物进行数据采集和存储,通过驱动子系统对直线运动电机和转向运动电机进行控制,通过电源子系统对电源的电压和电流进行实时检测,通过报警系统对前方障碍物进行报警,通知人员对障碍物进行移除。